

Hace algunas temporadas viajé a México para uno de los tradicionales Especiales de Fin de Año de Autocosmos, y tuve la suerte de ser de los pocos periodistas especializados de Chile en probar la descomunal aceleración del Tesla Model S P100D en su Ludicrous mode.
Dos cosas me llamaron tremendamente la atención de esa experiencia: la primera era el latigazo con el que te pegaba la cabeza al respaldo; la segunda, que apenas se escuchaba un chirridito del neumático y nada más, aún pisando el acelerador a fondo.
¿Por qué un auto de combustión, aún con Launch Control, salía chillando, mientras que el eléctrico no hacía resbalar las ruedas? ¿Cómo puede ser esto si el torque del EV es instantáneo, lo que debería de romper la tracción de cuajo? Antes veamos cómo trabaja el control de tracción.
TC: Traction Control
El sistema es, en teoría, bastante simple, si las ruedas que llevan la fuerza al piso giran más rápido que las otras, entonces están resbalando. La respuesta para devolverles la tracción puede darse de dos maneras:
- Bajar la potencia interviniendo en la inyección de combustible
- Aplicar el freno en la/s rueda/s que resbalan
Si bien se pueden aplicar ambos, en la actualidad el más usado es el segundo, ya que es más simple, rápido y puntual de la rueda que pierde agarre. La contracara es que puede terminar fatigando los frenos por sobrecalentamiento, y que depende del tiempo de los sistemas como el hidráulico.
Control de tracción en los EV
Además de actuar puntualmente con los frenos en la/s rueda/s que resbalen, en los modelos eléctricos resulta más fácil y rápido modular la cantidad de fuerza del motor, pero hay más.
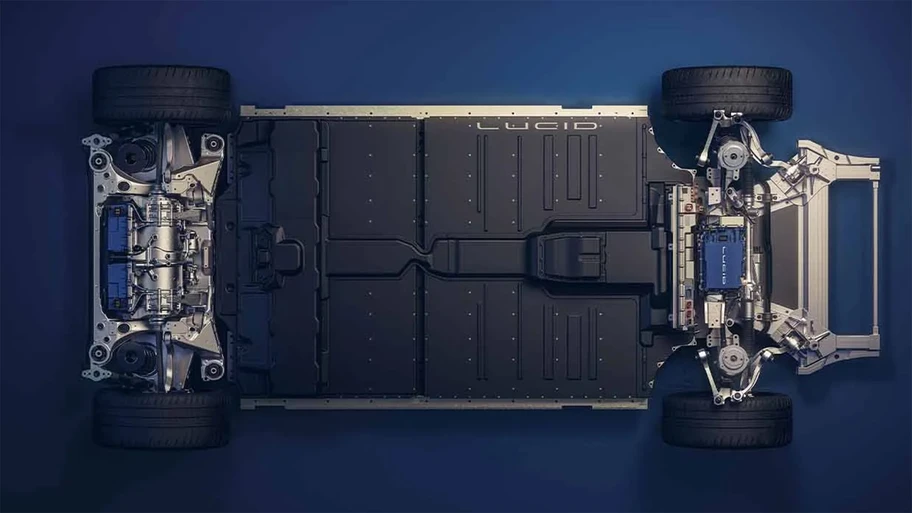
Los vehículos eléctricos más avanzados no solo tienen un motor por eje, pueden incluso ofrecer uno por rueda y esto permite regular la fuerza individualmente. El resultado no es solo bajar de manera óptima la potencia al suelo, sino jugar con eso como si fuera un diferencial de vectorización, es decir, hacer girar más rápido una rueda que la otra mejorando el paso por curva.
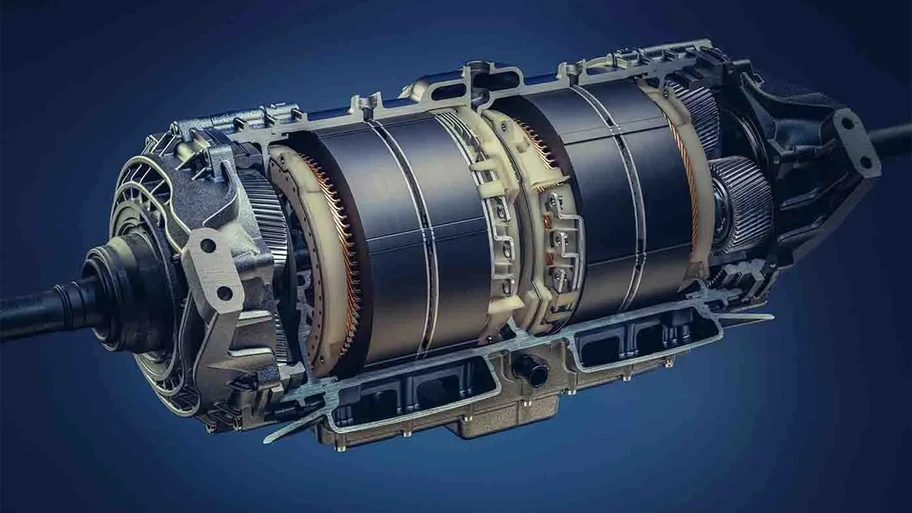
La clave está en la velocidad de respuesta, piensa que estos motores pueden girar hasta a 20.000 rpm, por eso tienen una unidad de control integrada, que trabaja en conjunto con el resto de la electrónica del auto, pudiendo aplicar cambios en tiempos que se miden en milisegundos.

Lo interesante de estos sistemas es que no solo permiten mayor eficiencia de tracción en rectas y en curvas, también habilitan gestionar el comportamiento del auto, incluso permitiendo derrapes controlados para un mayor placer de conducción. Lo que seguramente no suceda es que el auto quede librado 100% al pie derecho de su jinete porque serían indomables con potencias de más de 600 Hp y torques cercanos a los 1.000 Nm de entrega instantánea.
Si estás pensando que la experiencia de conducción se volverá muy artificial, recuerda que un modelo de combustión actual de altísima performance hace muchas de estas cosas con electrónica controlando componentes mecánicos, y que sistemas como las direcciones eléctricas, que originalmente se sentían como de videojuego, hoy ofrecen muy buen tacto.
La respuesta será contar con controles de todo tipo, o bajar el peso y la potencia. Yo prefiero lo segundo.

